2025
Moja rola:
- Projektant – część mechaniczna
- Przygotowanie wstępnego projektu (model 3D), rysunków na potrzeby weryfikacji rozwiązania przez klienta
- Projekt techniczny
- Dokumentacja wykonawcza
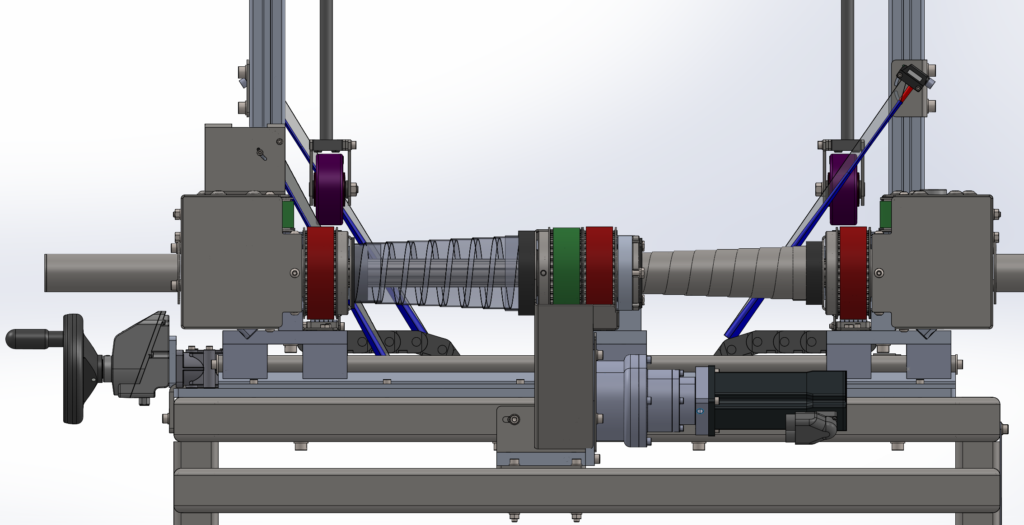
Największe wyzwanie
Synchronizacja pasów dolnych z bocznymi.
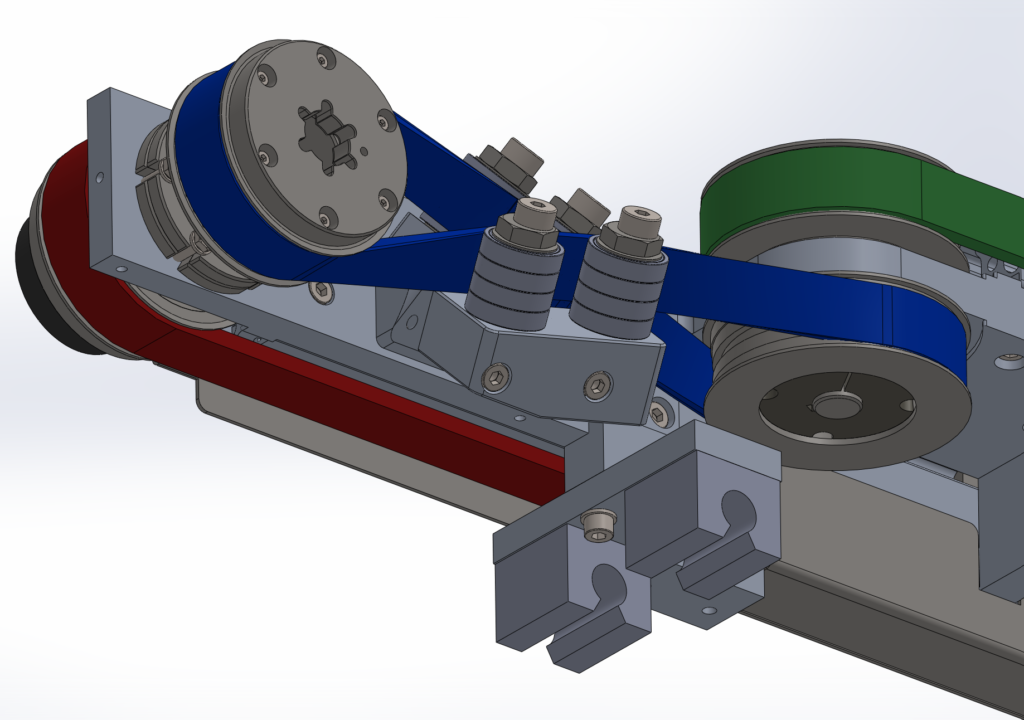
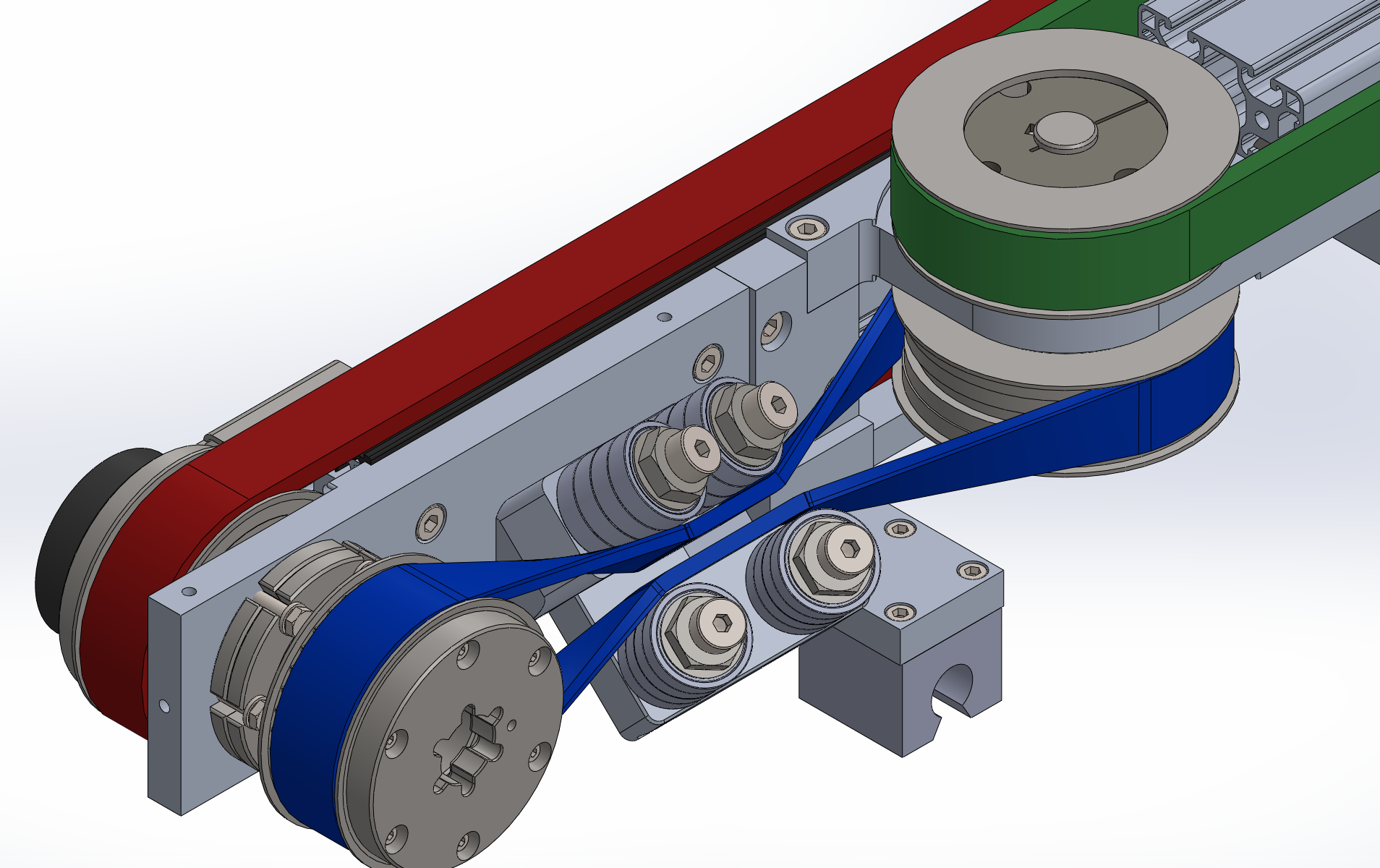
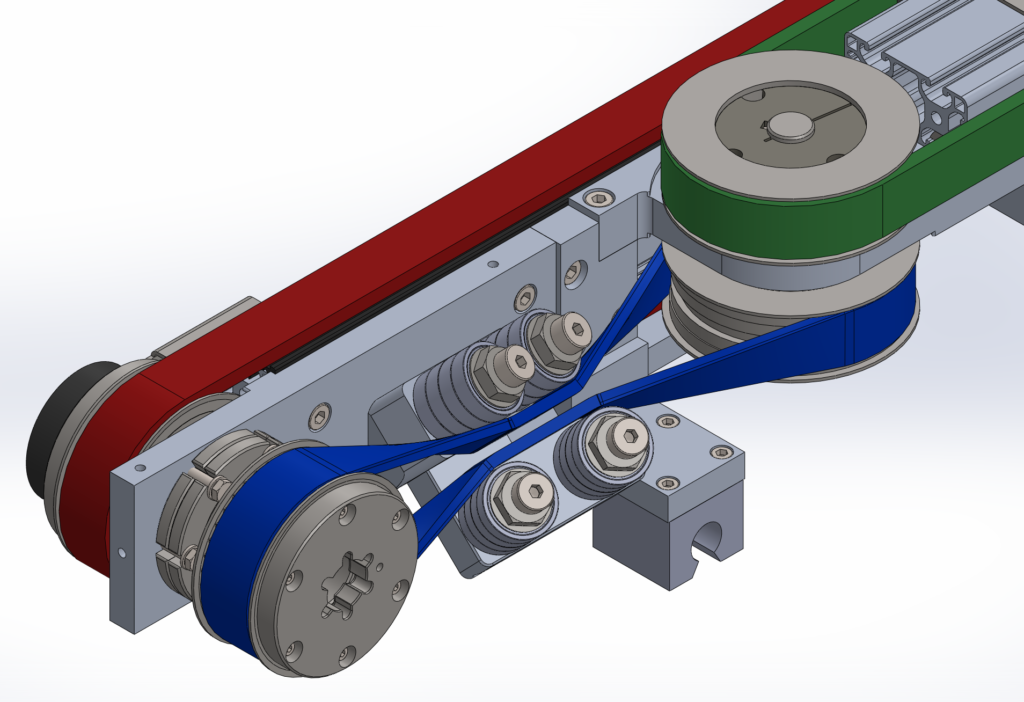
Rozwiązanie
Przekładnia ze skręconym pasem zębatym.
Pozwala ona połączyć dwie osie nie leżące na wspólnej płaszczyźnie.
Kluczem jest znalezienie odpowiedniego ustawienia rolek odchylających pas.
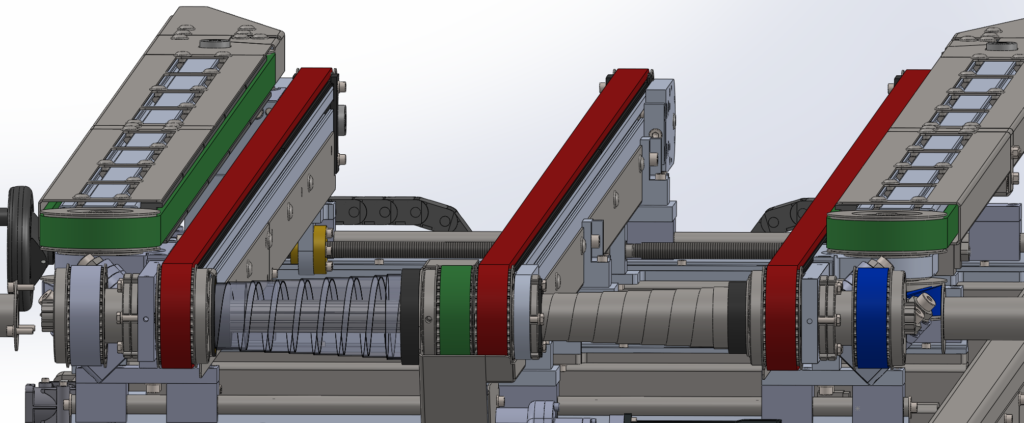
Opis projektu:
Przenośnik transportuje kartony, w które dwa roboty wklejają kartonowe absorbery. Kartony mają różne długości i szerokości.
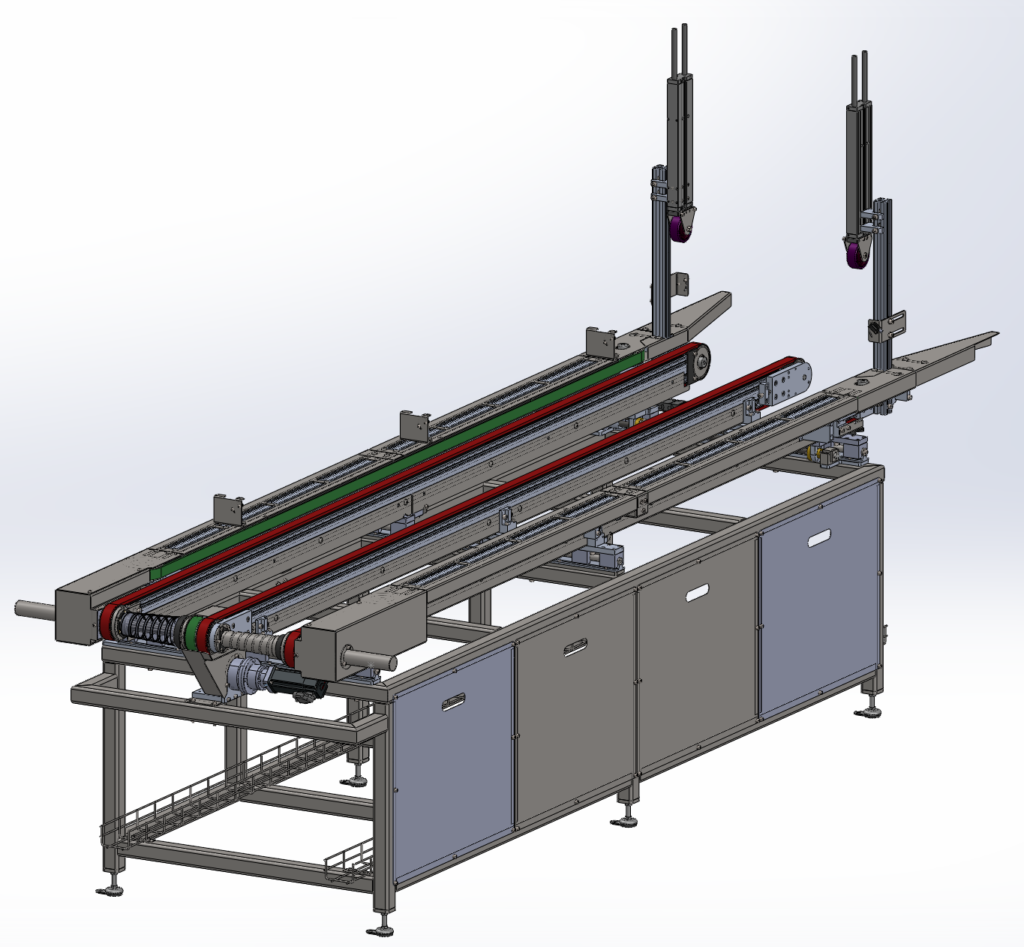
Wyzwanie
Aby robot mógł wkleić absorber, system musi znać dokładną pozycję kartonów przez cały czas transportu. Aby klej chwycił absorber musi być dociśnięty do ścianki kartonu, co może powodować jego przesunięcie się na przenośniku.
Rozwiązanie
Dwa boczne pasy ściskające lekko karton, zapewniając odpowiednią siłę trakcyjną.
Kolejne wyzwanie
Synchronizacja pasów spodnich z bocznymi.
W wymaganej konfiguracji nie można użyć gotowych przekładni kątowych. Po prostu takich nie ma. Potrzebny był by bardziej skomplikowany, wieloelementowy układ przeniesienia napędu.
Rozwiązaniem okazała się przekładnia ze skręconym pasem zębatym, która łączy dwa koła osiach skręconych względem siebie o 90 st, ale nie leżących w jednej płaszczyźnie.